
ロボットハンドリング・パレタイズ
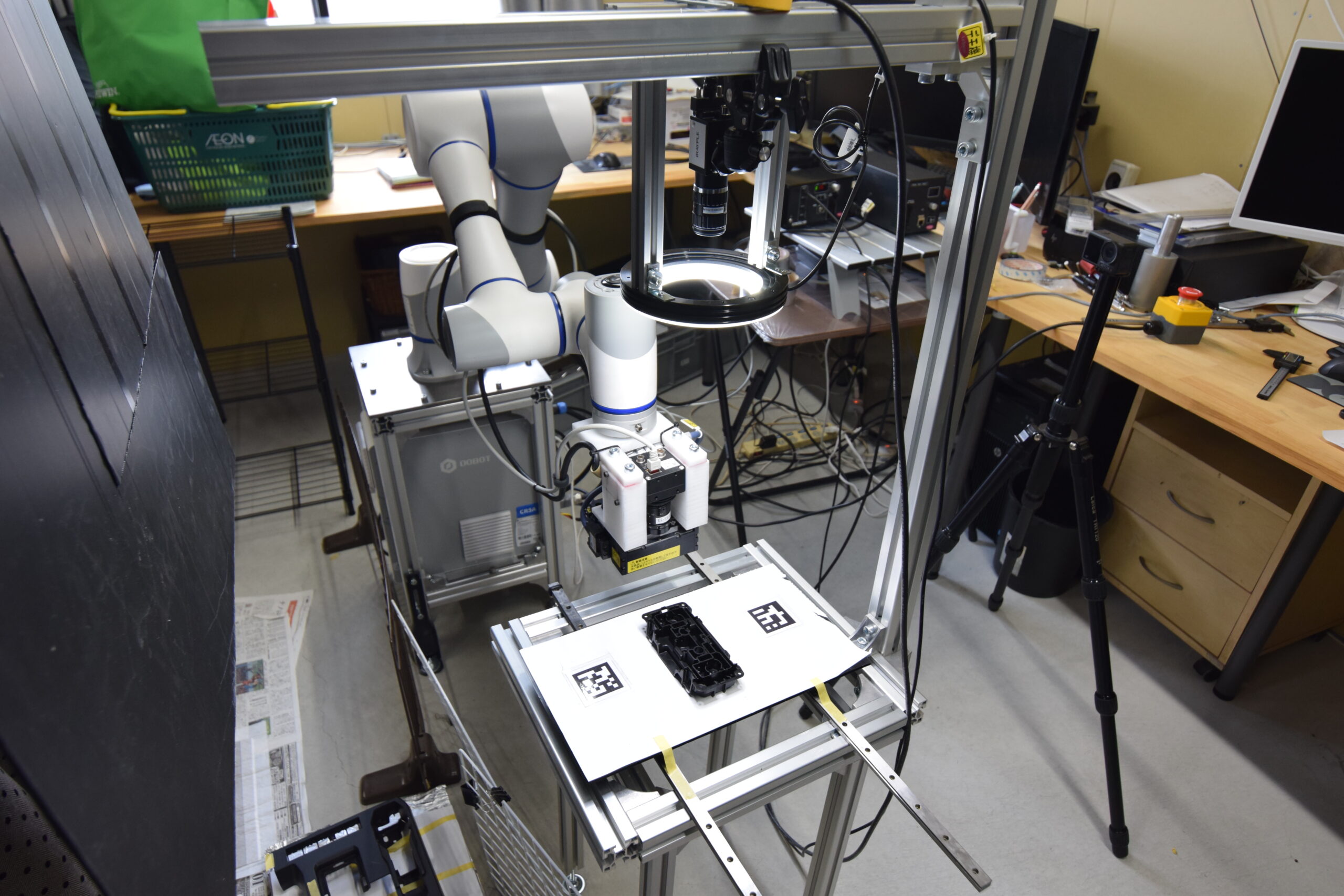
ロボットにラインカメラを取り付けて
製品外観チェック
仕様
当社では、協働ロボットを用いた製品・部品・資材のハンドリング自動化において、設計・製作まで一貫して対応しています。
ワークの形状や重量、作業工程を踏まえ、搬送・移載工程を自動化し、作業負担の軽減と生産性向上を実現します。
ラインカメラを協働ロボットに取り付け、複雑な形状の製品にも良品判定を行うシステムを設計 製作から一貫対応しております。
ARマーカを使用して、ロボットの位置制御
仕様
当社では、製品や段ボールの整列・位置決めからパレタイズまでの工程を自動化するシステムを、設計から製作まで一貫して対応しています。
搬送物のサイズや形状、積載条件を考慮し、正確で再現性の高い位置制御を行うことで、安定した積載作業を実現します。
カメラとARマーカを使用して、ロボットの位置決めシステムを設計製作を行っております。
製品の定位置からズレていても、カメラで、ロボットの位置を補正して、ロボットに補正量を伝え、製品のハンドリングをする事ができます。
双椀ロボットを使用して 内装部品のクリップ挿入
仕様
当社では、カメラで内装部品のクリップ挿入の一致を認識して双椀ロボットでクリップを掴み、製品に挿入したり、
製品をハンドで掴み 外部カメラで良品かどうかチェックしたりする事ができます。その様な事も設計製作から行います。